CONTEXTUALIZAÇÃO
O assunto da robótica tem sido amplamente estudado e utilizado nas mais variadas áreas e, em ambientes subaquáticos, tem-se igualmente buscado o desenvolvimento de tecnologias que permitam a construção de robôs submarinos capazes de operar adequadamente nessas áreas relevantemente importantes para questões ambientais, tarefas militares e científicas.
A utilização desses equipamentos submersíveis – em português chamados de Veículos Submersíveis Não Tripulados (VSNT) ou Veículos Submersíveis Operados Remotamente (VSOR) – pode nos ajudar a melhor entender os ambientes subaquáticos nos oceanos, rios e lagos ou em outros locais, como tanques em plantas industriais para diversas atividades (YUH, 2000). Em geral, esses veículos são empregados em situações nas quais há risco considerável à vida humana ou como instrumento de apoio, permitindo, por vezes, a transmissão de imagens em tempo real à equipe de apoio.
Os veículos subaquáticos comandados remotamente têm sido o grande destaque tecnológico da indústria naval e da robótica, em função da enorme gama de aplicações que a eles se pode dar, uma vez que seu operador e sua equipe técnica – mesmo estando em terra firme ou embarcados nas proximidades – podem acompanhar em tempo real uma inspeção realizada pelo equipamento, inclusive sem riscos para a vida humana.
Uma das formas de classificação desses veículos está relacionada com os graus de automação e de autonomia de operação. De acordo com a literatura (EGESKOV, 1995), o submersível pode atuar em quatro diferentes modos, conforme ilustra a figura 1.
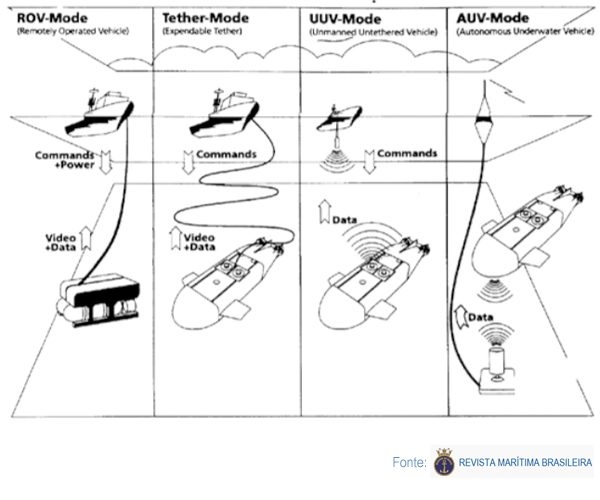
Figura 1 – Modos de operação dos submersíveis (EGESKOV, 1995). Imagem: Reprodução/ Revista Marítima Brasileira.
– ROV ou VSOR (Remote Operated Vehicles), quando o submersível é conectado à embarcação de apoio, à plataforma ou a outra estação fixa ou móvel por meio de cabos chamados umbilicais, pela qual são transmitidos os dados e a energia;
– Tether, quando no umbilical são transmitidos os dados;
– UUV (Unmanned Untethered Vehicle), quando inexiste o umbilical, mas há a transmissão de dados por meio de ondas; e
– AUV (Autonomous Underwater Vehicle), quando inexiste a transmissão de dados entre o veículo e a embarcação de dados. A diversidade de modos de operação e as necessidades impostas às tarefas desses equipamentos têm gerado o desenvolvimento de novas tecnologias, especialmente nos campos da hidroacústica, da microeletrônica e da robótica, bem como o desenvolvimento de certa gama de estudos referentes ao comportamento dinâmico desses robôs submersíveis. O assunto envolve vários campos, como instrumentação, identificação de sistemas, navegação, controle e processamento de sinais em tempo real.
PESQUISAS EM TORNO DO ASSUNTO
Organizações militares pelo mundo afora têm investido fortemente no desenvolvimento de pesquisas em torno do assunto, notadamente com finalidades bélicas. No setor civil, igualmente muitas pesquisas têm sido realizadas nesse campo. No exterior, existem várias empresas que atuam na área de desenvolvimento de veículos submersíveis não tripulados.
Algumas delas se destacam pelo alto grau tecnológico e/ou pela sua presença no mercado. É o caso da Deep Ocean Engineering (DOE) que já fabricou mais de 600 ROVs. E seus principais veículos da linha Phantom permitem a inspeção e a execução de diversas atividades subaquáticas, notadamente para ambientes marítimos.
No Brasil, a Universidade de São Paulo (USP), por exemplo, em trabalho conjunto com o Instituto Técnico de Lisboa e o Instituto Oceanográfico de Goa, desenvolve um AUV chamado Pirajuba, cujas linhas de pesquisa se concentram na questão da dinâmica e do controle do veículo (LVNT-USP, 2006).
Na mesma instituição – em parceria com o Centro de Pesquisas e Desenvolvimento Leopoldo Américo Miguez de Mello (Cenpes), da Petrobras, e a Universidade Federal do Rio de Janeiro –, vem sendo desenvolvido outro veículo, chamado Laurs, tendo 1,2 metro de boca (B), 0,8 metro de altura (D) e 1,4 metro de comprimento (L). Nesse caso, o grupo de pesquisa tem focado seus trabalhos nos sistemas de navegação, controle e gerenciamento.
Outras universidades brasileiras, como a Universidade Federal da Bahia e a Universidade Federal de Minas Gerais, também possuem grupos de pesquisa na área de veículos submersíveis não tripulados.
Destaca-se, ainda, que algumas empresas e institutos atuantes no País operam alguns desses equipamentos por meio de importação, como o caso do Cenpra, órgão do Ministério da Ciência, Tecnologia e Informação, situado em Campinas (SP), que importou e opera o Hydratec, desenvolvendo serviços e estudos com o seu veículo.
A empresa Ampla (FAPESP, 2007) possui um VSNT para inspeção em túneis de adução. A empresa SubSea, por meio de sua subsidiária no Brasil, dispõe de um veículo que foi totalmente desenvolvido no exterior para uso de inspeção visual.
O Instituto Oceanográfico da USP adquiriu, em 2013, o AUV Slocum da Teledyne, que permite mergulhos com profundidades de 200 metros.
A APLICAÇÃO EM AMBIENTES FLUVIAIS
Apesar da crescente utilização desses equipamentos como instrumentos de apoio às atividades humanas, principalmente nos ambientes marítimos em todas as partes do mundo, paradoxalmente há a carência desse tipo de recurso em ambientes fluviais, especialmente no Brasil.
Nos ambientes fluviais, são diversas as aplicações que certamente podem utilizar dessa ferramenta tecnológica com inúmeras vantagens. Serviços como inspeção de cascos e hélices de embarcações teriam acentuada redução de tempo e de custo. O equipamento pode realizar visualizações e gravações da estrutura e de avarias das embarcações, reduzindo significativamente os custos em perícias, não necessitando, por exemplo, retirar a embarcação da água.
Inspeção de estruturas civis submersas, como pilastras de pontes, barragens de represas, represas, turbinas de usinas hidrelétricas, condutos, píeres, estruturas de cais, entre outros, e a inspeção e vistoria de galerias subterrâneas de águas pluviais e estações de tratamento de água e esgoto são outros exemplos clássicos de sua aplicação.
Pelo seu tamanho reduzido, tais veículos podem entrar com facilidade em tubulações com fluxo de água (ou outros líquidos), localizando avarias e quaisquer não-conformidades internas. Caso a tubulação esteja submersa, é possível também obter imagens de avarias externas à tubulação, como incrustação, rompimentos ou rachaduras.
São ferramentas ideais para a realização de pesquisas científicas de caráter biológico ou ambiental em um ambiente subaquático.
Por meio dos robôs subaquáticos, é possível fazer observações de diversos animais, comportamentos e habitat, tais como cavernas e naufrágios, acomodando inclusive outros instrumentos que venham facilitar a pesquisa. Em fazendas de aquicultura, tais equipamentos possibilitam um monitoramento visual do recurso pesqueiro, a fim de facilitar sua identificação, observar migrações e locais de reprodução e desova, aferir a efetividade dos petrechos escolhidos para o cultivo e observar espécies invasoras ou avarias nas redes e poitas.
O OBJETO DE PESQUISA
Dada a relevância desse assunto, desde meados dos anos 1990, vêm ocorrendo esforços de pesquisadores da Faculdade de Tecnologia de Jahu (Fatec-JH) para desenvolver veículos submersíveis não tripulados, notadamente para operação em ambientes fluviais. A Fatec-JH localiza-se no município de Jaú, interior do Estado de São Paulo. Mantida pelo Centro Paula Souza, instituição pública do Estado, é pioneira nos cursos de Tecnologia Naval com especificidade para ambientes fluviais.
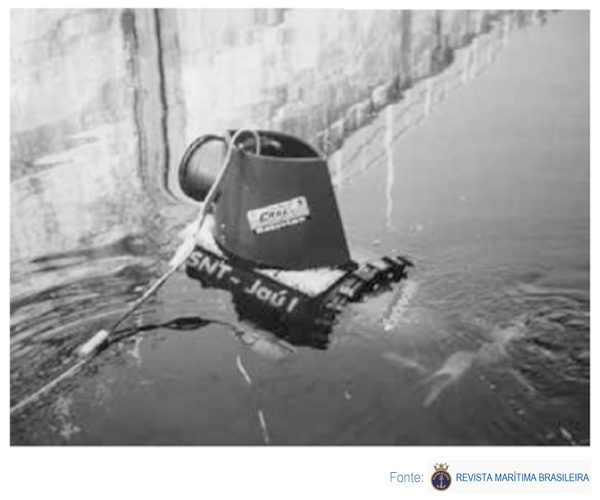
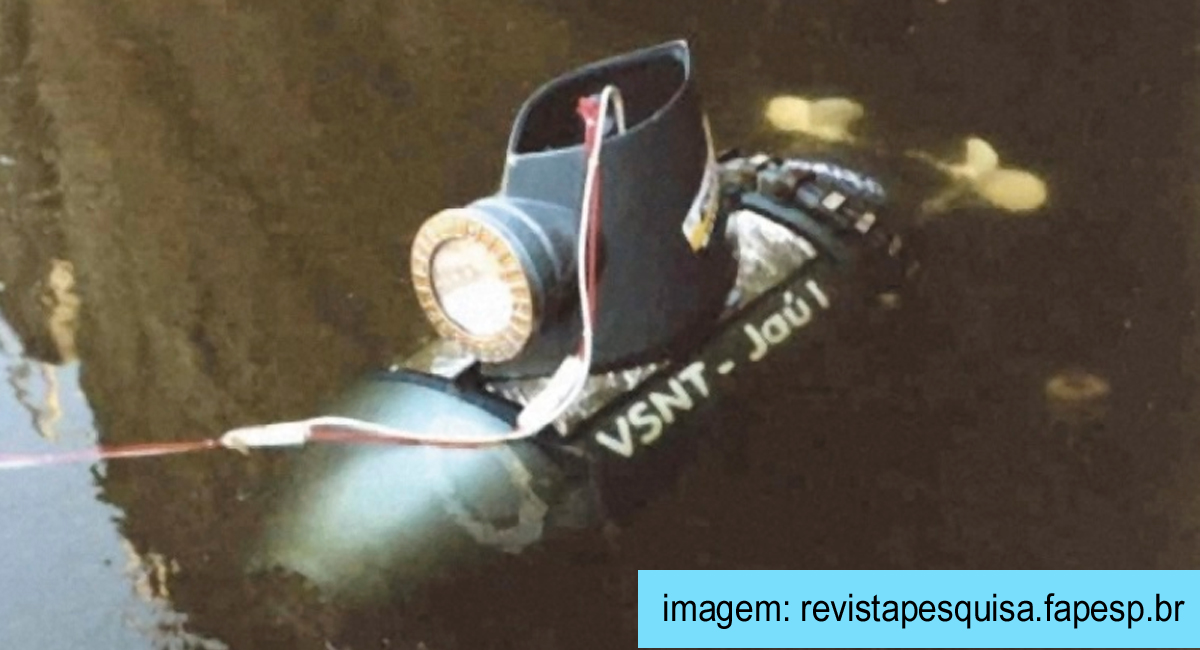
VSNT Jaú I em operação na câmara da Eclusa de Barra Bonita – Rio Tietê (SP). Imagem: Reprodução/ Revista Marítima Brasileira.
Um dos principais objetivos também é poder desenvolver veículos submersíveis não tripulados que possam ser viáveis economicamente, uma vez que equipamentos do gênero existem e operam por todo o mundo, todavia com custo elevado, inviabilizando por vezes seu uso para tarefas mais simples e em águas rasas.
A finalidade básica desse equipamento é de auxiliar atividades subaquáticas de análise e vistoria de obras civis, tais como estruturas de obras de barramento de rios, pilares de pontes, estruturas acostáveis de terminais de transbordo de carga, cabos submersos, obras vivas de embarcações, entre outros, em ambiente fluvial, além de analisar e vistoriar condições do leito do rio e permitir o apoio a pesquisas relacionadas ao meio ambiente, inclusive atividades em águas abertas.
Os submersíveis desenvolvidos na Fatec-JH têm recebido a denominação de Jaú, nome, na ortografia atual, do peixe de água doce que também deu origem ao nome do município. O Jaú I é a primeira versão desses veículos submersíveis não tripulados projetada e construída para operar remotamente, via cabo, e em ambientes fluviais.
Essa versão apresenta dois motores, responsáveis pela propulsão e pelas manobras, dotados de sistemas de controle linear de rotação e de reversão. Conta também com um sistema de lastro móvel e um equipamento de filmagens, o que lhe permite a execução da tarefa de inspeção visual. Sua operação é pelo modo Tether, isto é, comunicação via cordão umbilical.
Na segunda versão, chamada Jaú II, também operada pelo modo Tether e cujas dimensões principais são L = 2,66 metros; B = 1,63 metro e D = 1,14 metro, procurou- -se implementar um sistema de controle computacional, com a placa controladora situada a bordo do veículo. Este é dotado de seis motores, controlados por placas dedicadas, visando a sua movimentação com seis graus de liberdade. A aquisição de imagens é feita por meio de uma câmera digital. Da mesma forma que a versão anterior, a energia do veículo é obtida por meio de baterias chumbo-ácido seladas, localizadas no próprio veículo.

VSNT Jaú II. Imagem: Reprodução/ Revista Marítima Brasileira.
Os comandos de acionamento do veículo são efetuados via cabo, em que as informações provenientes do veículo e os comandos são processados em um computador externo, localizado na embarcação de apoio ou em terra.
Um terceiro veículo teve seu início com a construção do casco e com o mesmo formato hidrodinâmico do anterior, porém em escala reduzida de 1:2,66, ou seja, L = 1 metro; B = 0,61 metro e D = 0,43 metro, denominado como VSNT Jaú III. Todavia o trabalho com esse veículo se encontra interrompido, aguardando melhores definições de projeto.
O Jaú IV possui escala ainda mais reduzida, porém com o mesmo formato hidrodinâmico das duas primeiras versões. Entre os seus diferenciais estão o método e o material utilizado na fabricação do casco, que usou a técnica de prototipagem rápida, tendo como matéria-prima básica a Poliamida PA12, diferente dos anteriores confeccionados em fibra de vidro.

VSNT Jaú III. Imagem: Reprodução/ Revista Marítima Brasileira.
As versões de veículos submersíveis em estudo na Fatec-JH, tanto o Jaú I como o Jaú II, assim como a grande maioria dos Veículos Submersíveis Não Tripulados, são operadas pelo modo Tether, isto é, um cordão umbilical que interliga o equipamento submerso ao controlador em terra, transmitindo dados de comando. Tanto no modo ROV como no modo Tether, um grande inconveniente reside na existência do “cordão umbilical” que interliga o veículo ao operador, no primeiro caso levando inclusive energia elétrica e no segundo caso, sinais de comando. Em ambas as situações, a existência desse cordão de conexão causa diversas restrições e dificuldades às operações, como o arrasto provocado pelo cordão, a conveniência de se operar em águas calmas e a necessidade de uma embarcação de apoio junto à operação, por vezes necessitando de um sistema de posicionamento dinâmico, que encarece sobremaneira a operação.
Em atividades de inspeção, principalmente em dutos ou locais com vários obstáculos, equipamentos dos modos ROV e Tether, por possuírem um cabo de comunicação, encontram certa dificuldade na execução da tarefa. Por outro lado, veículos autônomos AUV precisam já dispor de uma rota preestabelecida, que, em geral, nesses casos é desconhecida.
Para operação pelo modo UUV nos veículos de operações em terra e aéreas, uma das formas de controle mais empregada é a do radiocontrole. Todavia, em operações submersas, tal técnica não tem sido empregada em função da dificuldade de propagação de sinais de radiofrequência em águas profundas. Apesar disso, alguns experimentos preliminares indicaram a viabilidade de aplicação dessa tecnologia para pequenas profundidades.

VSNT Jaú IV. Imagem: Reprodução/ Revista Marítima Brasileira.
O estudo levado a efeito por este pesquisador objetivou encontrar os limites dessa dificuldade, promovendo uma análise teórica do assunto, e, posteriormente, testar possíveis alternativas. E culminou por comprovar a viabilidade e, de certa forma, contrariar o embasamento preliminar de que ondas de rádio não se propagam pela água ao encontrar a faixa de frequência que possa operar em ambientes fluviais, promovendo o controle do veículo, seus movimentos e atitudes e a integração de todos os sistemas que o compõem: iluminação, aquisição de imagens, controle (malha aberta), atuadores (propulsores) e de energia.
Dessa maneira, o Jaú IV é um veículo compacto, controlado remotamente por ondas de rádio, sem qualquer contato físico com o operador.
Possui seis motores elétricos com controles independentes, inclusive de sentido e rotação, oferecendo ao veículo todos os graus de liberdade, alimentado por baterias de polímeros de lítio, que em água doce operam com segurança até a profundidade de 15 metros.
CONSIDERAÇÕES FINAIS
É de ressaltar que se trata de um objeto de estudo acadêmico que carece de uma fase de testes práticos em ambientes reais e sob as diversas condições climáticas. Todavia testes em ambientes controlados vêm demonstrando seu perfeito funcionamento em todas as funções planejadas.
Um obstáculo tecnológico ainda não transposto está no transmissor de vídeo que deverá enviar a um monitor de TV, junto ao operador, os sinais captados por uma câmera instalada no veículo. Tal transmissor em estudo deverá também operar na faixa de frequência utilizada para os sinais de comando.
Fonte: REVISTA MARÍTIMA BRASILEIRA/ V. 136 nº 07/09 Ed. jul. / set. 2016. As matérias publicadas na REVISTA MARÍTIMA BRASILEIRA podem ser reproduzidas, com a citação da fonte.
Autor deste Artigo: LUIZ ALBERTO SORANI* Tecnólogo em Sistemas Elétricos.* O autor é professor de Rede Elétrica de Embarcações e de Sistemas Elétricos de Bordo nos cursos de Tecnologia Naval da Faculdade de Tecnologia de Jahu (Fatec Jahu). Mestre em Engenharia Naval (ênfase fluvial) pela Escola Politécnica da Universidade de São Paulo (EPUSP).